|
Our research area encompasses the fields of ‘Structures and Machine Design’ and "Planning and Analysis for Intellectual Resources”.

1. Mechanism and Machine Design
- Conceptual Design
for Systematic Structures
- Conceptual Design
for Gear-oriented Function
- Conceptual Design
for the Static Equilibrium of structures
|
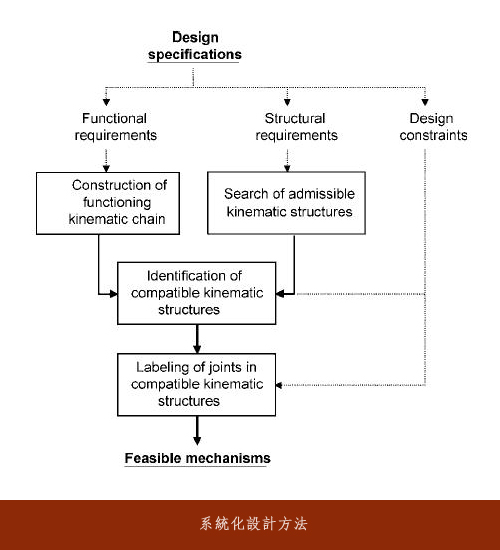
Our laboratory has tried to classified structures’ functional requirements into various structural types of characteristics, in order to be effectively used in design process. We named the systemic method as A Methodology for Conceptual Design of Mechanisms by Parsing Design Specifications (2005) and published in ASME Journal of Mechanical Design, which is with the highest impact factor in the field of structural design. The method has also applied to actual verification of structural analysis and design in the conduction system of process equipment for wafer transfer.
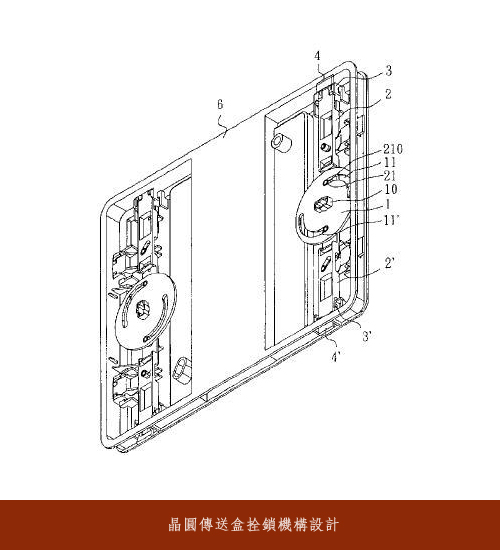
The research mainly concentrates on the patents related to various wafer transfer and wafer positioning mechanism design, which differs from the patent avoiding the technical use. The know-how for design patent extract and organize the know-why for structural design, and the result came out of a successful design breakthroughs.
In recent years, variable extension of topology structures has been classified and it has built a basis for systemic topology structures. We synthesized a new design by the effectiveness of the characteristics in variable extension of topology. The associated article, On the Topological Representation and Compatibility of Variable Topology Mechanisms, was published in ASME 2009 International Design Engineering Technical Conferences.
|
 |
 |
|
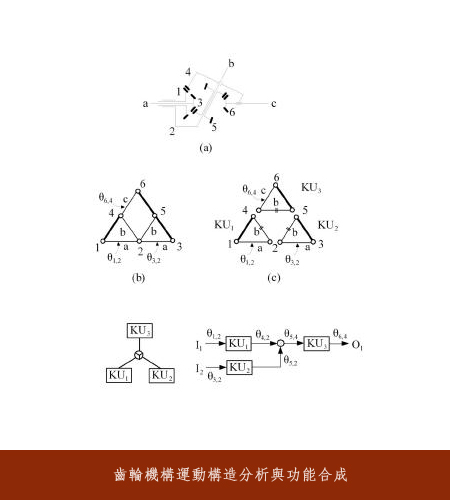
Our laboratory mainly researches the concept of gear kinematic chain decomposition by movement decomposition, the overall increase in input and output can be determined along the motion unit of the transmission path. The article, Kinematic Analysis of Geared Mechanisms Using the Concept of Kinematic Fractionation (2004) , was published in Mechanism and Machine Theory. We explore the relationship between the path of motion transmission and the type of overall increase through the structural characteristics of gear kinematic chain, to configure and classify the motor unit. This research won the “Best Paper Award” and" Professor Zeng, Jin-Huan Memorial Award” in the 9th National Machine Design Conference. The article, Kinematic Characteristics and Classification of Geared Mechanism by the Concept of Kinematic Fractionation (2008) , was published in ASME Journal of Mechanical Design.
In the request of redundancy rod, we classified the gear type and proposed to specify the overall type of gear configuration for the lever, input rod and the output rod. The research, Kinematic Synthesis of One-dof Geared Mechanisms According to Specified Gain Types (2008) , was published on 2008 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. We currently discussed the motion behavior between coaxial rod and gear kinematic chain. The degradation in constructor cannot separate from the movement behavior of gear kinematic chain; thus, the guidelines, rules and characteristics related to kinematic chain and gear degradation are derived.
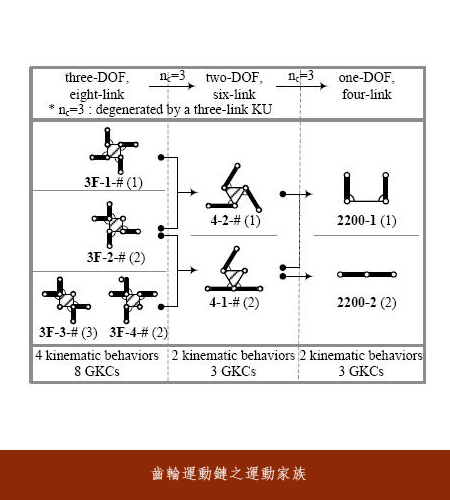
Apply this concept to the existing atlas of gear kinematic chain; we established a number of different degrees of flexibility and movement for the rod gear kinematic chain. The results show that there is a specific dependencies relation between the gear kinematic chains with different flexibility motion. We developed a systematic and efficient topology synthesis method to enumerate the dual-input of mixing speed mechanism; the characteristics of derivation and topological structural synthesis are furthered discussed.
|
 |
 |
|
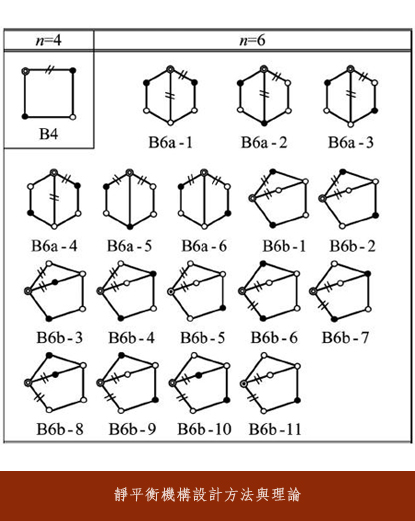
Static equilibrium equilibrates the structures in balance status; it has been widely used in daily life, such as: lamps, brackets of surgical lamps, brackets for monitor. Our laboratory used a spring of elastic potential energy to offset the gravitational potential energy and to reach static equilibrium. We proposed a design method and used the installation for the springs in the linkage design of static equilibrium. The loads in a general four-bar linkage system can be balanced in the condition without parallel rods. A systematic design reaches static equilibrium with planar mechanism without the help of auxiliary rod. The article, Design of Perfectly Static-Balanced One-DOF Planer Linkages with Revolute Joints Only (2009), was published in ASME Journal of Mechanical Design. By the results of dynamic simulation software (ADAMS), we verify that this method can be successfully used in Stevenson III and Watt I structures. In addition, in the balance of the gravity of numerous flexibility degrees for mechanical robot, we proposed a design method by using a certain number of spring to balance a certain flexibility degrees of the structure, the process of the robotic arm movement is able to maintain the given speed without additional braking force. The article, Design of a Gravity-Balanced General Spatial Serial-Type Manipulator, was published on ASME Journal of Mechanism and Robotics in 2010.
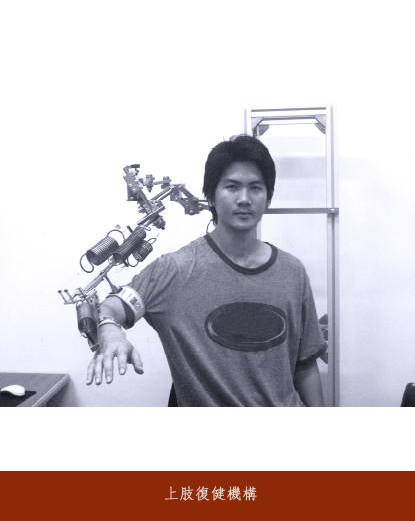
We applied the concept of springs’ gravitational balance on rehabilitation aids, the spring loaded on the aids will offset the gravitational potential energy on patients’ upper limbs when patients wear the aids for joint movement. It assists in patients’ self activities in the aid of brake components and sensors; therefore, it also significantly reduces the cost of the structures. The article, Design of a Training and Rehabilitation Upper Limb Exoskeleton without Actuators for Hemiperatic Stroke Patients, was announced on the 11th National Machine Design Academy Conference in 2008 as well as won the “Best Paper Award” and" Professor Zeng, Jin-Huan Memorial Award”.
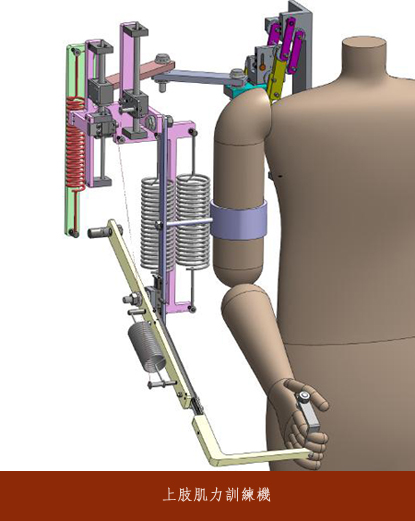
We considered the opposite concept for the balance of spring gravity through the contact position of the adjusting spring, and made it allows the spring as the sources of resistance in motion. The concept takes advantage to design an upper limb muscles to strengthen training machines. Except for the rehabilitation and movement of human’s upper limb, we extended the concept of static equilibrium to lower extremities of human body. The design is set to aid the paraplegics, disable patients and the elders with movement difficulty, by the help of rehabilitation structures may recovering their ability to walk.
In recent years, many studies have published in domestic and foreign academy conferences. The designs can be specified through both dynamic simulation software and 3D graphic, to practice in the prototype machine and the patent application.
|
 |
 |
 |
|
|
2. Planning and Analysis for Intellectual Resources
- Patent Quality Index Construction
and Industrial Competitiveness
- The Development of Industry Patent
Analysis and Layout
- Evaluation for Industry-University
Cooperation Performance
|
Our laboratory uses the quantity of patents approval and its reference relationship to evaluate the global company's technological competitiveness, and develop the EPI and EPS indicators to assess the quality of the patents performance for each company. The study results can be used to observe the innovation capability and competitive advantages for specific industries, it can be the measures for future potential development under knowledge-based economy, and leads the domestic industry on R&D management and intellectual property right.
The use of information mining techniques for co-citation, total class number and total word is practiced on research of the mapping illustration for knowledge related industries and applied to the distribution of the output of high-tech industry in Taiwan. The relation of class number and technology, and the measure of patents are combined to identify the changes of key economic industries in Taiwan.
|
|
For different types of technology and technical efficiency matrix analysis, the different techniques can successfully reach the efficacy as a form titles in vertical columns and rows; each grid is filled with the patent number, the information of patentee or inventor. The patent number points out the distribution status of technology and sub-technology research and development; the patentee shows the owners of key technologies and the inventor describes the core inventors of key technologies.
This research result provides the R&D direction for industries to avoid from competitors and the hot zone for patent, which has been gathered with numerous technology researchers), and to find the blank area which has not been developed yet or has not experienced technical difficulties at research and development.
|
|
The host of laboratory has proceeded the programs of Industry-University Cooperation Performance Evaluation with Higher Education Evaluation &Accreditation Council of Taiwan since 2006. The performance evaluation aspects include ‘industry funding and benefits’, ‘the collaborative range of industry-university cooperation’ and ‘the output results and the effectiveness in intellectual property’. The three dimensions of assessment show as a standard for schools to understand their current status of performance. It can be used as reference for future development and resources for investment ; it provides chances to enhance the academic achievements in economic value and it encourages teachers to participate in the ranks of industry-university collaboration.
With the limited budget and the funding relying on government, it must strive for financial resources, particularly the funding for industry-university and the efficiency of business organizations and the revenue and efficiency for intellectual property licensing, in order to understand the performance of the various colleges and universities in industry-university collaboration.
|
|
|
|

