|
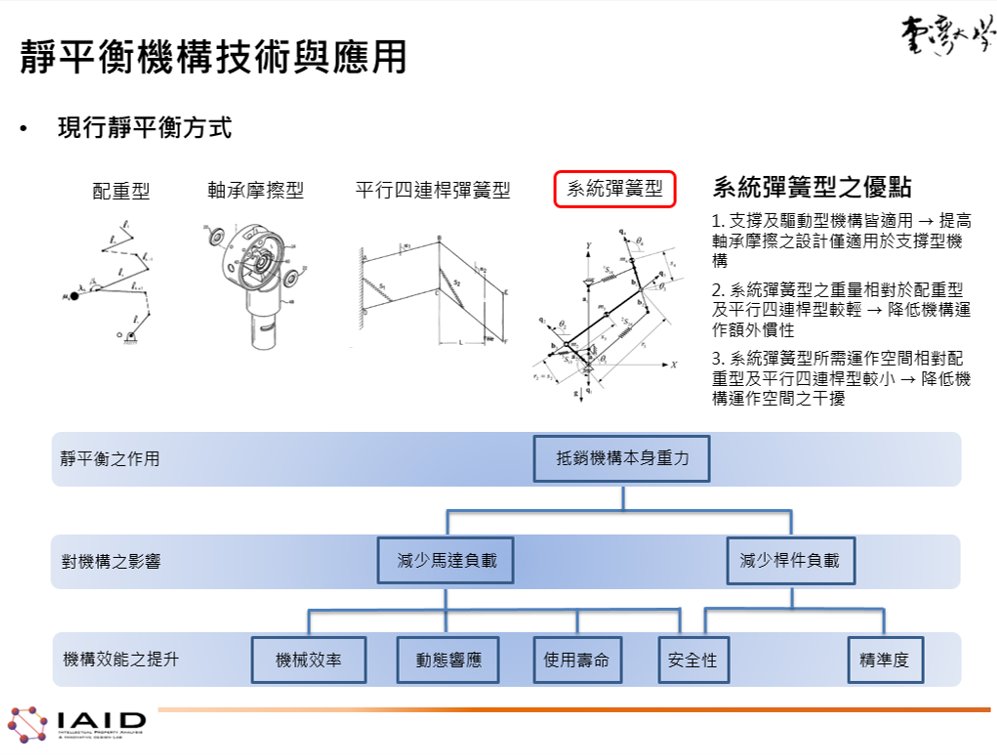
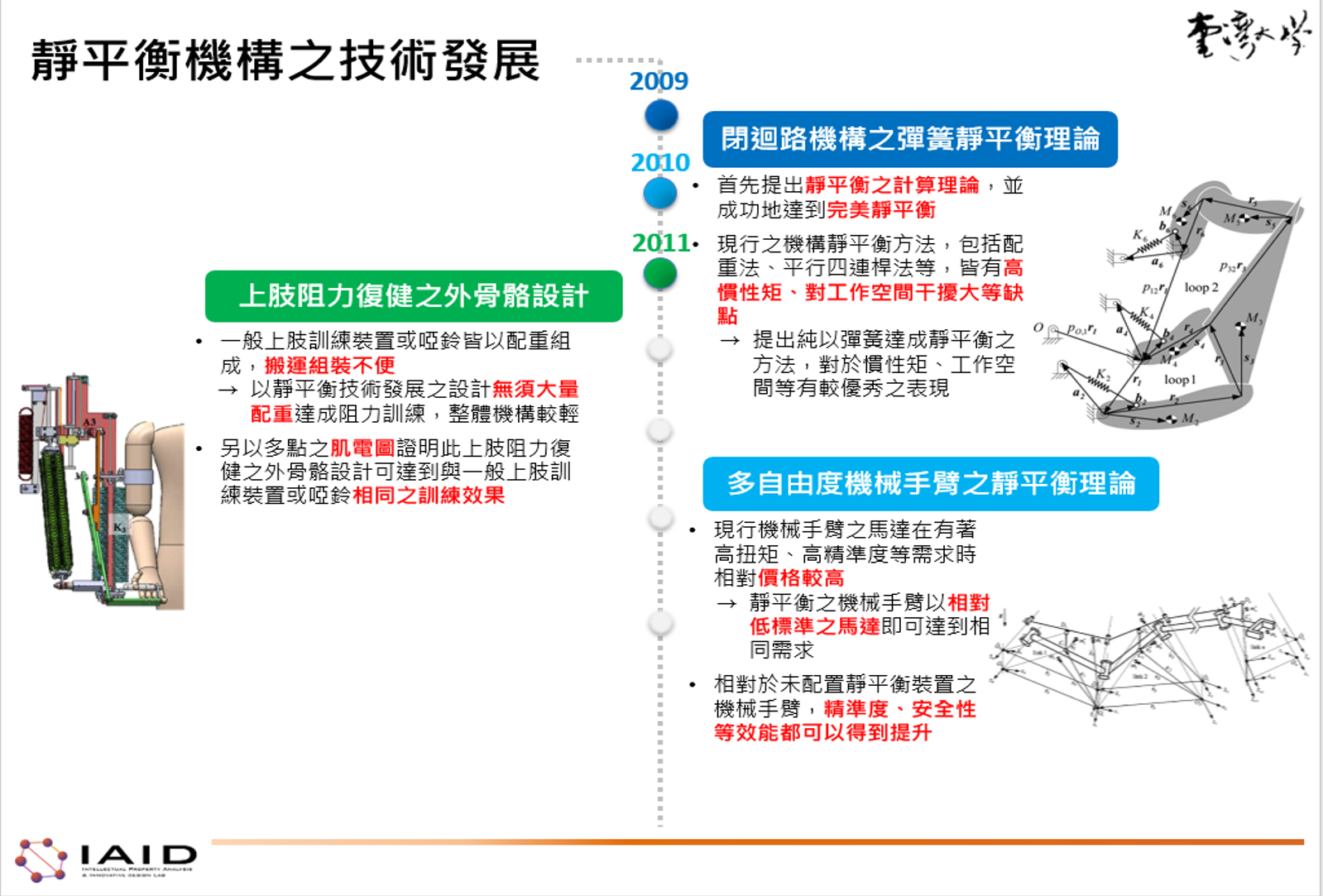
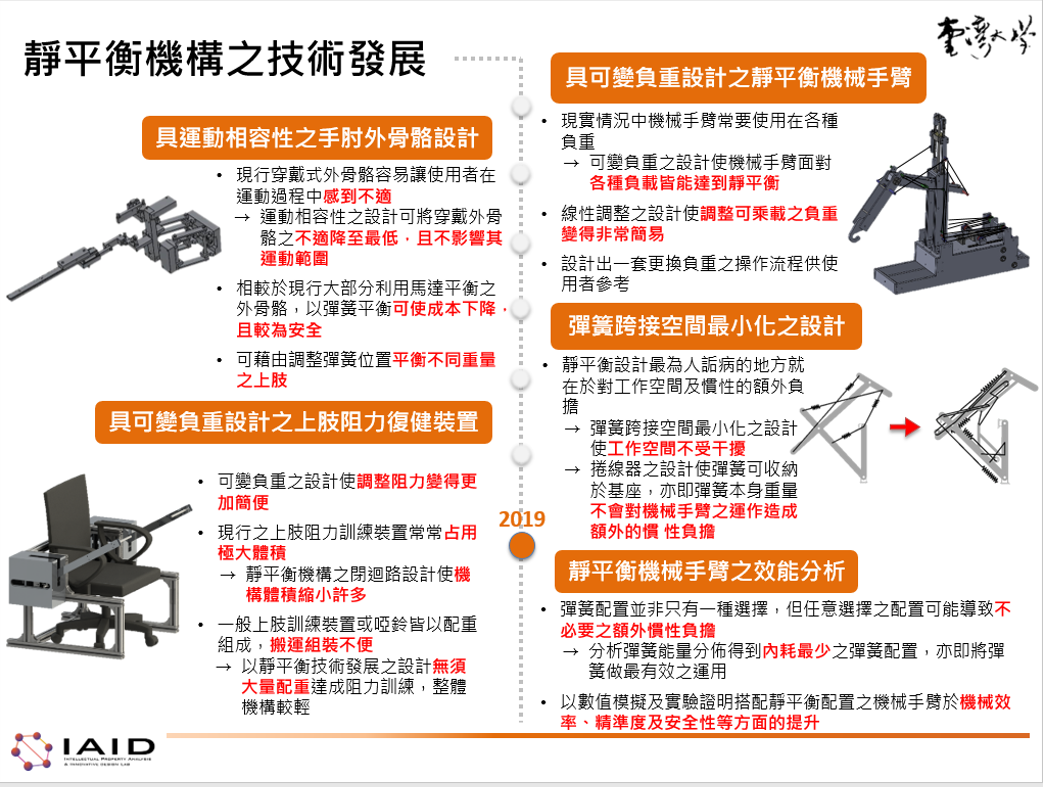
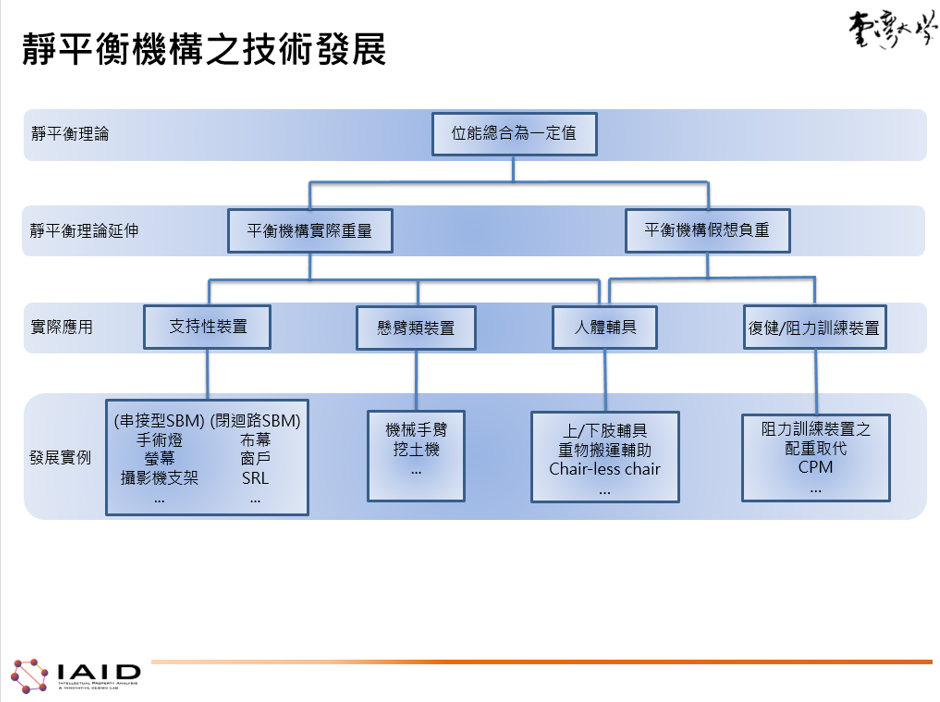
重力平衡機構能在重力場中能承載自身重力,使其於任意構型下皆處在靜力平衡狀態,操作這類機構只需要較少之致動力克服系統慣性,可提升驅動能源效率。多數之重力平衡方式藉由配重方法、接頭摩擦力、彈簧平衡等方式達成。配重方法增加了系統慣性,接頭摩擦力容易造成磨耗,降低耐用性,而彈簧平衡採用會產生阻抗變形力的彈簧,以儲能之方式平衡重力位能變化。國內外相關研究多以利用平行四邊形之輔助桿件加裝於欲平衡機構使得以安裝彈簧,以串聯方式構築多自由度機構,造成輔助桿件對系統提供額外慣性與桿件運動干擾等諸多不便。
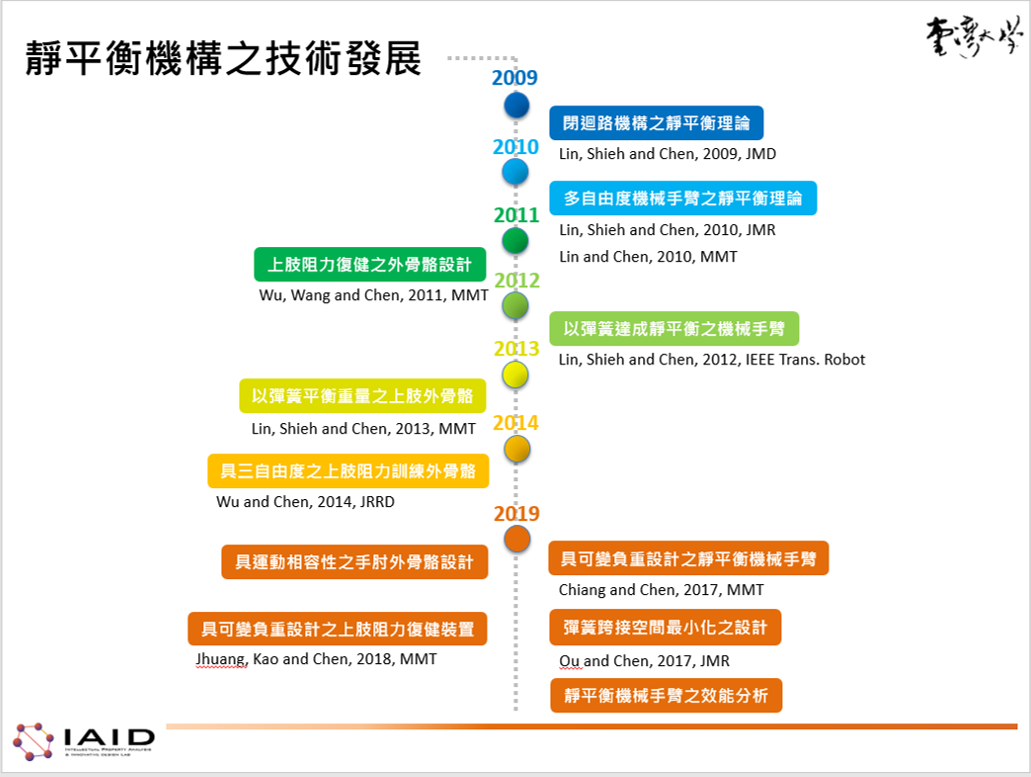
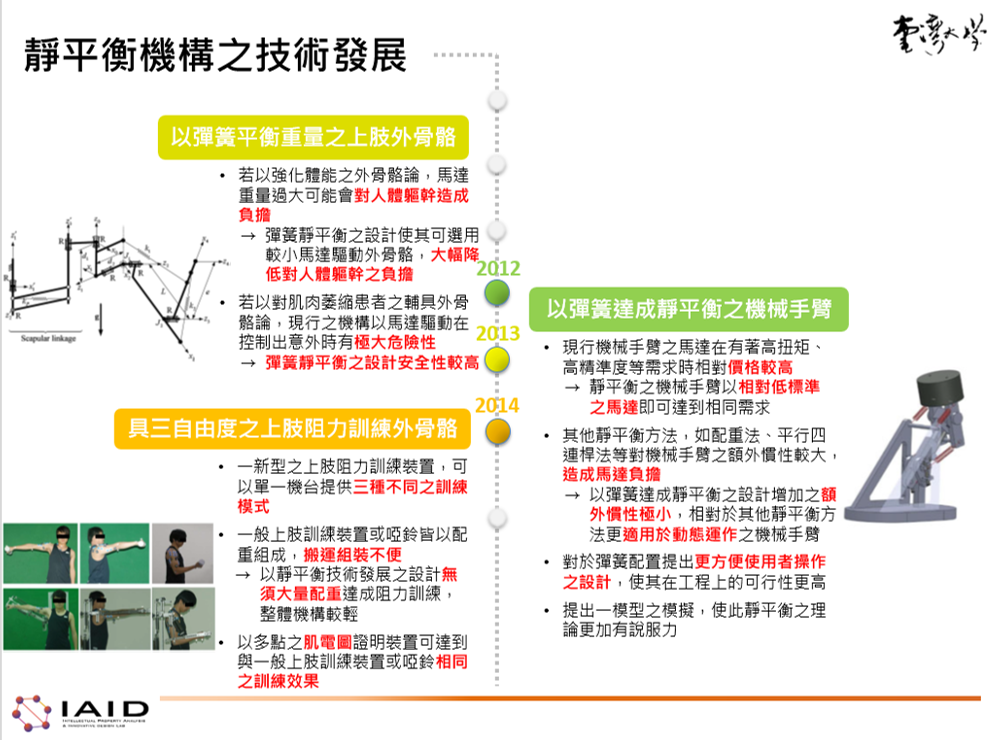
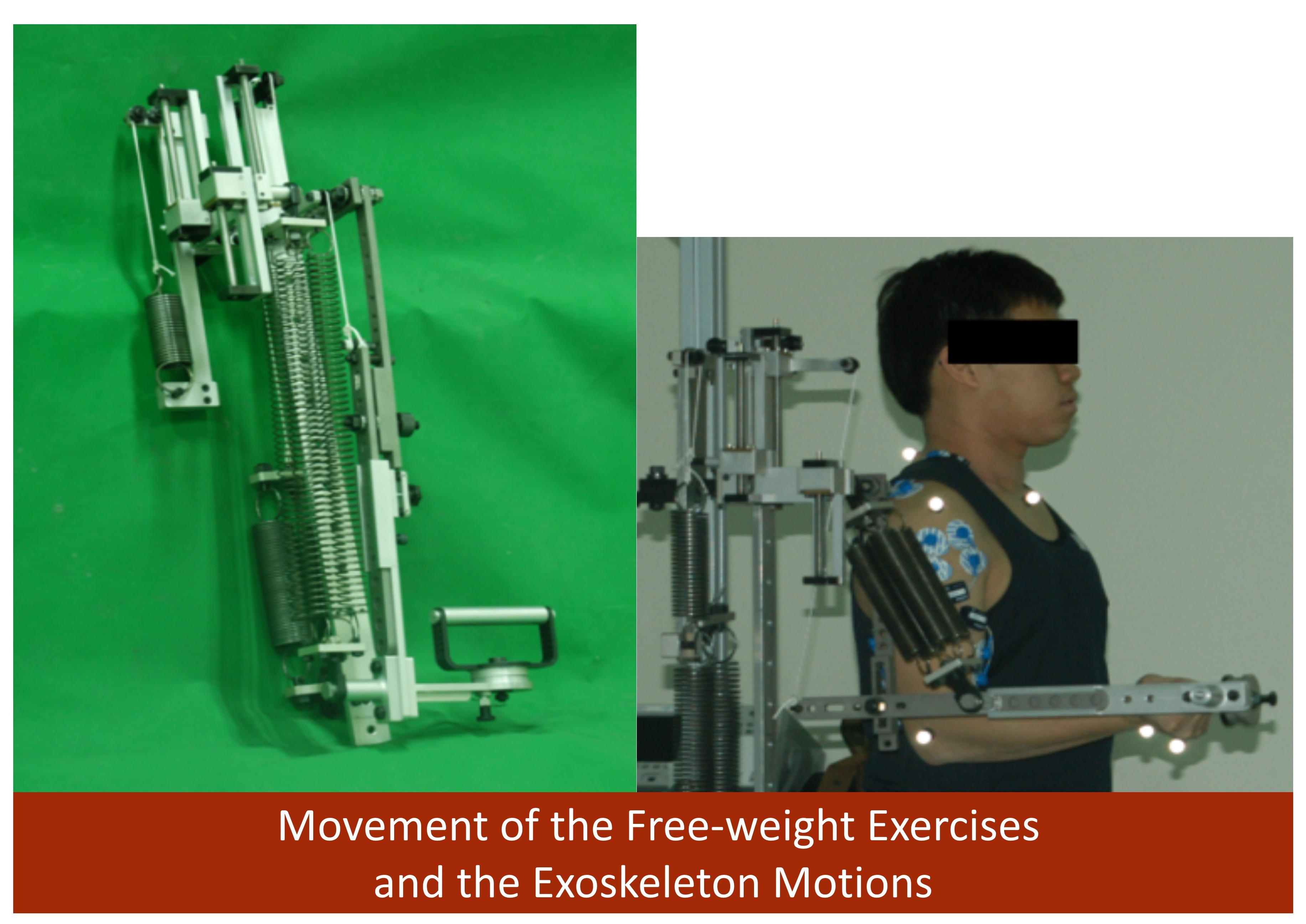
本研究室針對單自由度平面連桿機構提出不使用輔助桿件之彈簧重力平衡方法,搭配平面機構迴路拘束推導彈簧平衡條件,證明n桿之單自由度平面連桿機構只需(n/2)個彈簧即可平衡,並衍生不同彈簧位置、拘束桿件等設計,方法不僅具學理創新,也開闢系統化彈簧平衡機構設計之設計基礎。接著將理論拓展至空間機構,利用最少數目之拉伸彈簧平衡空間關節式機械手臂之重力負荷推導n自由度之機械手臂的彈簧配置。同時為因應不同操作狀態配重差異,調整彈簧配置參數,使重力平衡機構的設計理論更加完整,更接近產業應用。
 A51.
"Design of
Statically
Balanced Planar
Articulated
Manipulators
With Spring
Suspension" IEEE
Transactions on
Robotics,
(February, 2012) A51.
"Design of
Statically
Balanced Planar
Articulated
Manipulators
With Spring
Suspension" IEEE
Transactions on
Robotics,
(February, 2012)
A33.
"Design of
Perfectly
Statically
Balanced One-DOF
Planar Linkages
with Revolute
Joints Only"
ASME Journal of
Mechanical
Design, (May,
2008)
|